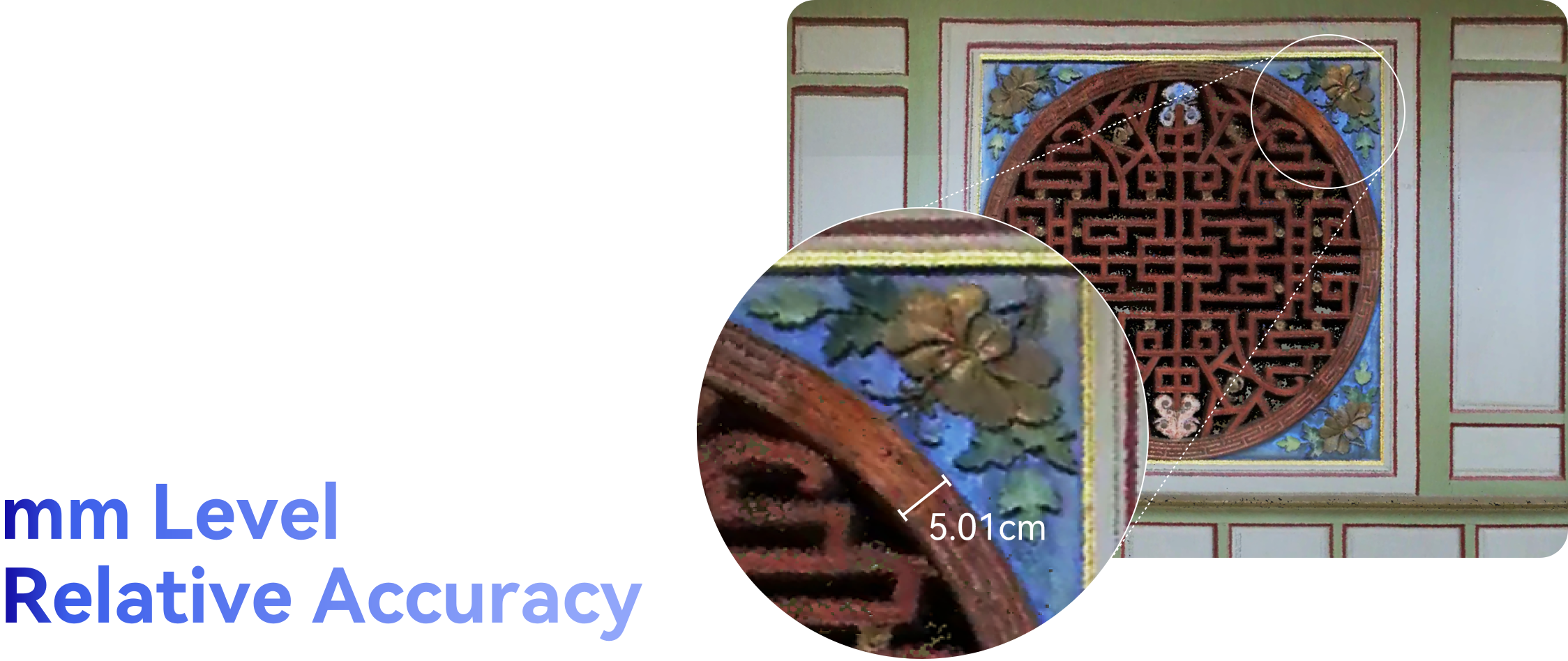
mm Level
Relative Accuracy
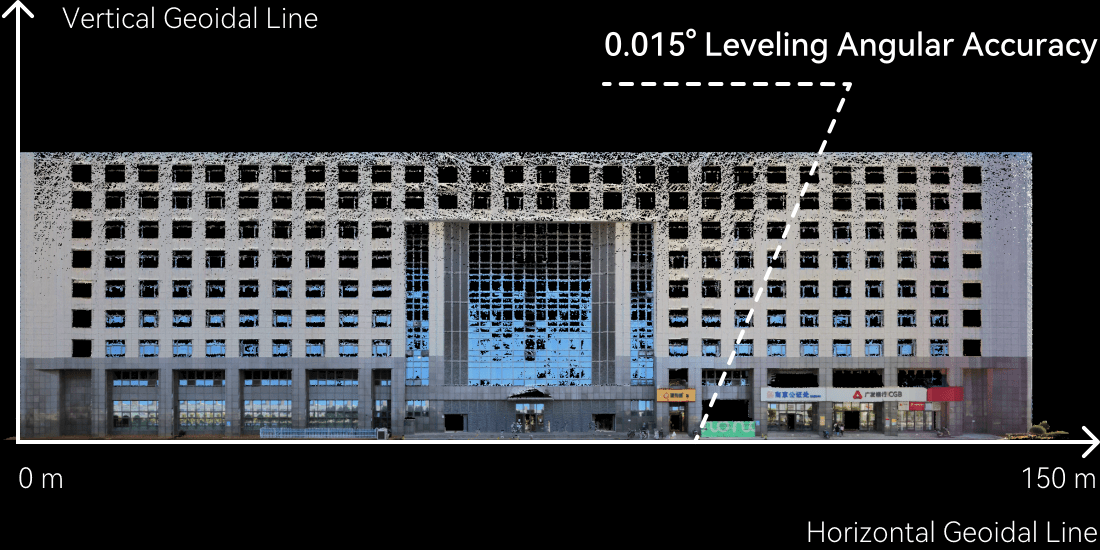
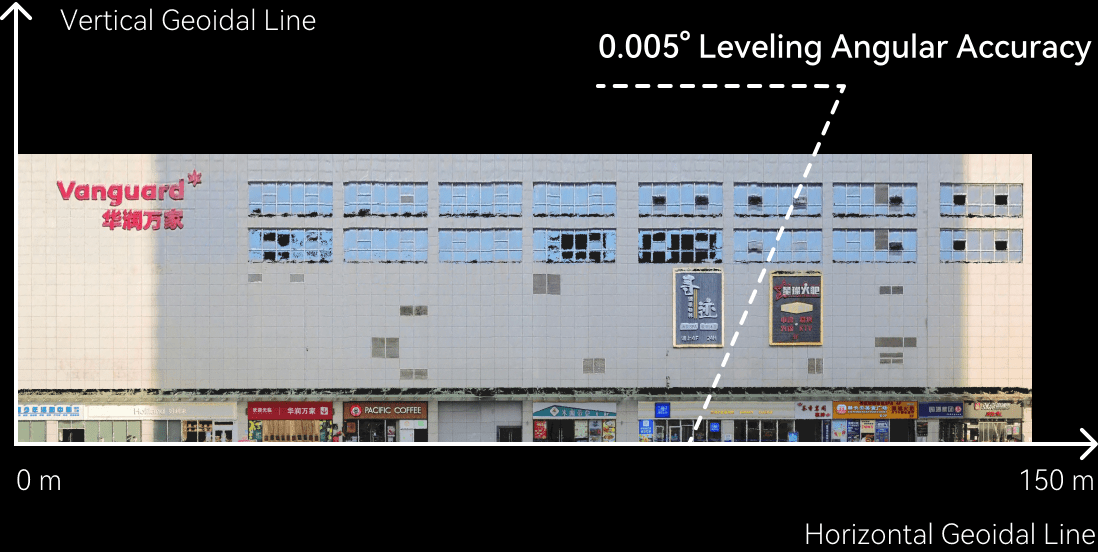
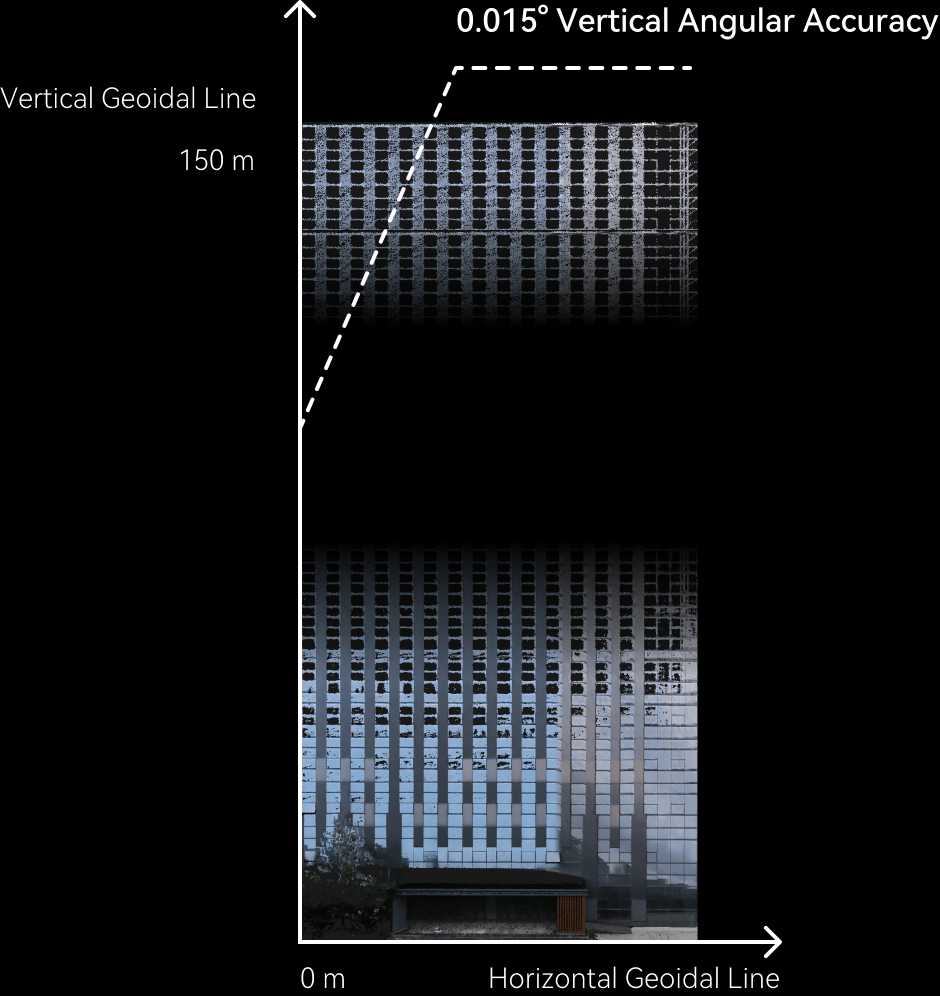
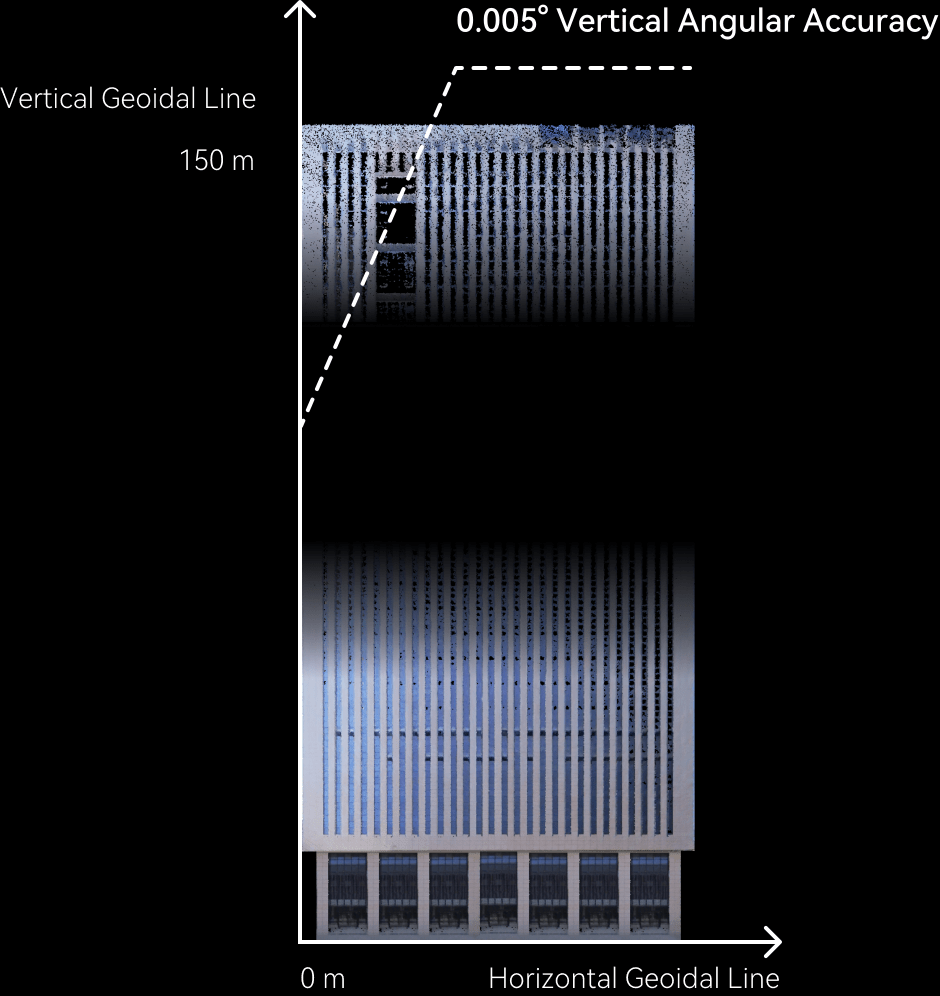
0.005°
Leveling/Vertical Angular Accuracy
2 cm
Absolute Accuracy
2 mm
Point Cloud Thickness
R8+ | World-Realistic Color, mm - Level Precision
R8+
A mobile 3D scanner with OmniSLAM Modeler which is a point cloud modeling system,
its powerful kernel successfully breaks the boundaries between point clouds and models.
In the journey of outlining the reality,
“R8+” is not just a tool,
it’s a companion along the way,
witnessing the perfect combination of virtualization and reality.

Rotating Single LiDAR Scanner
mm Level
Relative Accuracy
0.005°
Leveling/Vertical Angular Accuracy
2 cm
Absolute Accuracy
2 mm
Point Cloud Thickness
“R8+” Automatic Modeling
“R8+” builds models automatically without a clumsy cluster, just a single computer is demanded, which promotes the mobile scanning steps into “Model ERA”.
Large-scale
3D Gaussian Splatting
OmniSLAM 3DGS is purpose-built to address the digitalization challenges of ultra-large and highly complex environments. It enables unified, high-fidelity modeling of large-scale scenes such as industrial parks and major infrastructure. The system automatically generates ultra-realistic, high-clarity large-scene models, eliminating blur and distortion while delivering photo-level visual quality.
Precision Level (mm)
Measure Details Accurately
“R8+” acquires mm Level relative accuracy and point
clouds with precision level (mm) during mobile
scanning, making the measurement data detailed and
accurate.
“Exhaustive” Point Clouds
“R8+” carves the reality into the exhaustive point clouds with 250,000 pts/㎡, showing every single detail in plenty scenes.
“Immaculate” Point Clouds
The ultrathin point clouds of “R8+” can reach a thickness of 2mm, with accurate carving, specific details, and vivid effect.
High-precision
Leveling and Vertical Angular Accuracy
Magnificent Texture
with Pixel Level
“R8+” generates color point clouds with pixel level which brings you realistic effect.
The dual screen linkage
between panoramic image
and color point clouds
“R8+” supports dual screen function of panoramic image and color point clouds, so that users can view the same scene features simultaneously. Object judgement and drawing can be done accurately at one time, which reduces cost and increases efficiency.
True Color Point Clouds
of Large-scale Scenes
Accroding to NERF of OmniSLAM, “R8+” generates the realistic point clouds of each scan.

